Здесь будет поэтапно описываться построение тестового образца гауссовки новой конфигурации, которую я назвал «биступенчатой».
Эта топология была разработана в процессе создания несложного гаусса EM-2, когда я столкнулся с проблемой низкого КПД ускорения – применение коммутации катушек простыми тиристорами не позволяло добиться необходимой скорости снаряда. При этом количество ступеней ускорения было ограничено двумя, дабы не переусложнять конструкцию. С другой стороны, применить транзисторы в обеих ступенях тоже было нельзя, поскольку расчетный ток второй ступени превышал допустимые пределы для используемых MOSFET, причем независимо от схемы питания – с использованием общей батареи конденсаторов, либо с делением ее на два «банка». Запараллеливание транзисторов приводило к серьезному удорожанию всей конструкции (MOSFET был самим дорогим ее элементом).
В итоге я все-таки объединил питание обеих ступеней, но поставил на второй катушке не MOSFET, а дешевый тиристор. При этом для коммутации первой катушки хватило одного транзистора. Кусок схемы EM-2, иллюстрирующий сказанное, показан на рисунке ниже.
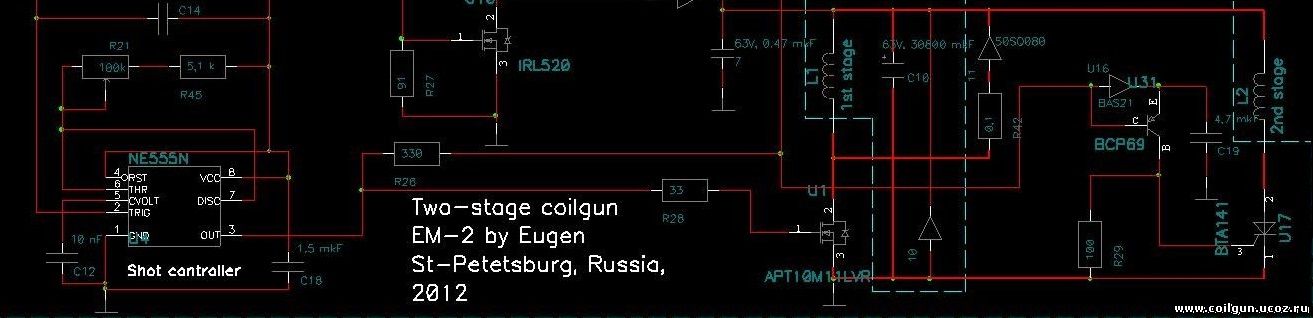
Рис. 1 Фрагмент схемы койлгана ЕМ-2, иллюстрирующий работу биступенчатой схемы ускорения.
Как видно, таймер генерирует определенной длительности, управляющий MOSFET первой ступени (поскольку транзистор всего один, нагрузочной способности таймера для этого вполне хватает). Одновременно заряжается маленький конденсатор С19, который на срезе импульса (т.е. при закрывании MOSFET) через транзистор bcp69 отпирает тиристор U17 . Так как больше ступеней ускорения нет, тиристор разряжает питающую емкость до конца, придавая снаряду дополнительное ускорение. Ясно, что данный алгоритм работы является простейшим для этой схемы, поскольку можно, например, открывать тиристор не одновременно с закрытием транзистора первой ступени, а с какой-то задержкой, подобранной для получения максимального КПД (или наоборот, заранее), но в рамках ЕМ-2 я этими усложнениями не занимался.
Для того, чтобы применить эту топологию в многоступенчатом ускорителе, достаточно поставить несколько таких блоков из двух катушек (отсюда и название «биступень») с общим конденсатором друг за другом, а запираемый ключ, коммутирующий первые катушки в каждой биступени, сделать общим для всей конструкции. При этом на все катушки, управляемые этим ключом, нужно еще поставить по тиристору, чтобы они не открывались все одновременно, а в качестве цепи гашения индуктивного выброса удобнее всего использовать один мощный варистор, соединенный с коллектором запираемого ключа. Какими плюсами обладает эта схема?
Рис. 2. Принципиальная схема многостадийного ускорителя по биступенчатой схеме.
Во-первых, благодаря тому, что в половине ступеней используется принудительное запирание, КПД ускорения получается выше, чем в схеме с незакрываемыми ключами (хотя и ниже, чем конструкциях, где все ступени коммутируются транзисторами). С другой стороны, по сравнению со схемами на транзисторных ключах, энергия конденсаторов утилизируется более полно, т.к. после выстрела все емкости оказываются разряженными.
Во-вторых (и это главное), удается оставить всего один управляемый ключ на всю схему. Почему так получается? Представим себе, что снаряд прошел первую катушку в биступени с номером N. После этого транзистор закрывается, и открывается тиристор N2, подключающий к соответствующему конденсатору CN вторую катушку. За то время, пока ключ закрыт, снаряд пролетает эту катушку, а конденсатор полностью разряжается. Когда же снаряд подлетает к следующей биступени (с номером N+1), транзистор опять открывается одновременно с тиристором (N+1)1, коммутирующим первую катушку биступени N+1, и цикл повторяется. При этом неважно, успел ли закрыться тиристор N1 или нет, поскольку конденсатор CN к этому моменту уже разряжен. То есть в данном случае скорость снаряда не играет роли, и биступени можно ставить вплотную друг к другу, что повышает компактность всей конструкции.
В третьих, разряд конденсаторов каждой биступени начинается с одинакового (высокого) напряжения, что позволяет снизить ток через управляемый ключ до минимума при сохранении приемлемой мощности. Этим биступенчатая конфигурация выгодно отличается от всех прочих схем, использующих для питания катушек общую емкость. В то же время, так как энергия каждого конденсатора распределяется на две катушки, потери на его внутреннем сопротивлении остаются невелики, что позволяет использовать биступенчатую топологию для достижения высоких скоростей снаряда (100 м/с и более).
1. Структурная схема.
Структурная схема гауссовки ЕМ-4 изображена на рис. 3. Как видно, она состоит из нескольких основных узлов:
- Низковольтный преобразователь (преконвертер, на рисунке он обозначен как LV converter). Он вырабатывает из напряжения аккумуляторов стабильное напряжение (+15В) для питания остальных частей схемы;
- Высоковольтный преобразователь (HV converter), заряжающий конденсаторы до необходимого напряжения перед выстрелом;
- Генератор управляющих импульсов (Pulse generator);
- Модуль силовых ключей (Power switching module);
- Сенсоры положения снаряда при выстреле и датчик наличия снаряда.
Рис. 3. Структурная схема койлгана ЕМ-4.
Конструктивно преобразователи напряжения выполнены на одной плате ("зарядно-контрольный блок"), а остальные модули - на других. Такое решение было продиктовано стремлением разделить низковольтную часть койлгана, в которой циркулируют постоянные токи большой силы, и высоковольтную импульсную часть, непосредственно участвующую в процессе выстрела.
2. Зарядно-контрольный блок.
Принципиальная схема зарядно-контрольного блока показана на рис. 4.
Как видно, низковольтный преобразователь выполнен на ИС LM78S40 по так называемой «повышающе-понижающей» (buck-boost) схеме. Это значит, что напряжение питания, поступающее от аккумулятора может быть как больше, так и меньше стабилизированного выходного напряжения. Такая особенность позволяет питать койлган от любых источников в широком диапазоне от приблизительно 5 В до 20 В (максимальное рабочее напряжение диода 1N5817). На этой же микросхеме выполнен узел контроля напряжения питания аккумулятора – при падении напряжения ниже порога, устанавливаемого настраиваемым делителем R6-R7-R9-R10, зажигается предупреждающий светодиод HL4 и блокируется работа остальных частей схемы через сигнал от оптопары HL3-T1.
HV преобразователь построен по схеме с контролем тока первичной обмотки трансформатора на стандартной ИС ШИМ-контроллера UC3843. При этом, однако, сигнал с токосъемого резистора R14 поступает не на предназначенный для этого вход UC3843, а на вспомогательный компаратор DA2. Причина такого решения проста – дело в том, что UC3843 имеет довольно большой порог ограничения по сигналу обратной связи – 1 В, что при планируемых токах (20 А и более) привело бы в стандартной схеме включения к слишком большой мощности рассеяния на токосъемном резисторе. На остальных элементах компаратора построен узел индикации напряжения заряда, выдачи разрешения на выстрел и остановки ШИМ-контроллера по схеме, отработанной мной ранее при создании «Электрического лука» ЕМ-3. Трансформатор использован стандартный типа POL-15073, а силовой транзистор и выпрямляющий диод установлены на небольшие радиаторы. При подборе режимов работы ШИМ-контроллера на ИС UC3843 использована методика, описанная в этой статье.
Рис. 4. Принципиальная схема зарядно-контрольного блока: преконвертер (сверху) и высоковольтный преобразователь (снизу).
На рис. 5 показана плата блока без компонентов, на рис. 6 – готовый блок. При разводке я предусматривал установку всех выводных компонентов на верхней стороне платы, а SMD – на нижней. Как видно, почти половину площади платы занимает выходная секция HV конвертера, предназначенная для «распределения» высокого напряжения из промежуточной емкости C7 в 6 отдельных батарей конденсаторов, питающих ускоряющие ступени койлгана. Для этого установлены 6 дополнительных диодов различной мощности, и изолированные разъемы, которые позволяют безопасно подключать и отключать конденсаторы. Кроме того, имеется дополнительный разъем для шлейфа, по которому передаются сигналы разрешения и индикации в другие части схемы.

Рис. 5. Плата без компонентов.

Рис. 6. Внешний вид готового зарядно-контрольного блока.
На видео ниже показаны испытание собранного блока на нагрузку в виде 6 конденсаторных батарей суммарной емкостью 1500 мкФ. Заряжаем до напряжения 400 В от стандартного 7,4 В литий-полимерного аккумулятора:
3. Расчеты.
Перед тем, как проектировать силовую часть ускорителя, необходимо провести подготовительные расчеты для определения таких параметров, как длительность ускоряющих импульсов в каждой ступени, амплитуды токов (что важно для выбора силовых ключей и их количества) и диаметр проводов для намотки катушек. В нашем случае это особенно важно, т.к., в отличие от койлгана ЕМ-3, где положения фотодатчиков могли регулироваться, в ЕМ-4 датчики должны размещаться неподвижно в определенных точках на стволе ускорителя. Таким образом, критически необходимо понимать, нужна ли дополнительная обработка сигнала фотодатчиков с добавлением временных задержек, или же эти сигналы могут непосредственно управлять ускоряющими катушками.
Для расчетов использовались следующие начальные условия: первая ступень питается от 450 мкФ (расчетное внутреннее сопротивление 33 мОм), вторая и третья - от 300 мкФ ( 50 мОм), четвертая и пятая - от 150 мкФ (100 мОм). Начальное напряжение - 400 В. Масса снаряда - около 3 г, калибр - 5,5 мм, внутренний диаметр катушек (он же наружный диаметр ствола) - 7 мм. При моделировании рассматривался случай, когда на обеих катушках каждой биступени рассеивается приблизительно одинаковое количество энергии (т. е. разряд емкости на первой катушке идет до ~ 285 В) - по предварительным обсчетам, такой вариант является наиболее благоприятным.
При расчетах, как всегда, использовалась программа FEMM, для чего был создан специальный скрипт, описывающий ускорение стреловидного снаряда в "биступенчатой" конфигурации гауссовки. Сам скрипт и подробные результаты расчетов помещены в специально созданный для этой цели раздел Расчеты в FEMM, здесь же я лишь кратко сформулирую основные выводы.
1) Все биступени можно наматывать одинаковым образом - первую катушку проводом 0,3 мм, вторую - 0,5 мм. При этом оптимальная длина каждой катушки оказалась равной 16 мм.
2) Координаты активации всех биступеней, обеспечивающие максимальный КПД ускорения, близки к - 2 мм (т. е. нос снаряда находится за 2 мм до переднего торца первой катушки). При этом задержка активации второй катушки влияет на КПД очень слабо и фактически для всех ступеней может быть принята равной нулю.
Эти два обстоятельства позволяют упростить схемотехнику койлгана, т. к. оказывается возможным управление ступенями непосредственно по сигналам от фотодатчиков, установленных в фиксированных (одинаковых относительно каждой биступени) положениях, без какой либо дополнительной обработки.
3) Расчетный ток в первых катушках биступеней не превышает 100 А.
Это позволяет использовать для их коммутации всего один силовой ключ (планируется IGBT транзистор типа IRGPS60B120KDP).
4) Расчетный КПД койлгана достаточно высок (на последней ступени он оказывается более 10%).
Вообще, изначально я полагал средний КПД гауссовки на уровне 6 %, что при энергоемкости 108 Дж (9 конденсаторов по 150 мкФ, десятый планируется использовать для "подающей" обмотки) и массе снаряда 3 г давало скорость на выходе ускорителя порядка 66 м/с. Но полученные результаты позволяют с известной осторожностью надеяться на получения выходной скорости более 70 м/с....
Посмотрим, что покажет эксперимент.
Еще одной темой расчетов при проектировании ЕМ-4 было мое первоначальное намерение вообще отказаться от использования оптических датчиков, и перейти к непосредственному управлению ускорением последовательностью сигналов с заранее запрограммированной длительностью. Такой подход использовал, например, Dantist в своих проектах DJ6 и DB6L, описанных на форуме Оружие будущего. Для проверки жизнеспособности такой конструкции я провел расчет ее устойчивости к вариации различных начальных параметров системы (скорость и масса снаряда, диаметр катушек и т.д.). Результаты такого расчета для одной биступени с начальной скоростью 30 м/с приведены на этой страничке. Оказалось, что система, лишенная датчиков положения снаряда, в некоторых случаях обладает крайне высокой чувствительностью к отклонению параметров от "оптимальных".
В итоге, решено было сохранить исходный проект и оставить оптические датчики в составе гауссовки.
4. Схемы модулей силовой части.
На рис. 7 показана упрощенная схема ускоряющей части койлгана ЕМ-4. Как видно, она состоит из 5 ускоряющих биступеней и одной "предварительной" катушки ("pre stage"), служащей для подачи снаряда из магазина в ствол. При этом первая катушка каждой биступени активируется соответствующим сенсором, который открывает тиристор и одновременно выдает разрешающий сигнал на линию высокого или низкого уровня. Тиристор же второй катушки открывается непосредственно по обесточивании первой катушки при помощи дополнительной обмотки, улавливающей импульс самоиндукции при закрытии силового транзистора (такой подход предложен здесь). ИК-светодиоды оптических сенсоров всех ступеней соединены последовательно и открываются внешним сигналом только на время выстрела, что снижает энергопотребление схемы.
Рис. 7. Схема ускоряющей части койлгана ЕМ-4.
Сами оптические сенсоры делятся на две группы в зависимости от того, к какой линии они подключены - сенсоры "высокого уровня" (high side или HS) и "низкого уровня" (low side или LS). Их схемы приведены на рис. 8. Как видно, принципиальное их различие только в полярности выходного сигнала - HS сенсоры имеют выход в виде открытого коллектора pnp-транзистора, а LS - npn. Такое решение позволяет, во-первых, подключить сразу несколько датчиков к одной сигнальной линии, а во-вторых организовать циклы активации-деактивации запираемого силового ключа, коммутирующего первые катушки биступеней по линии "power switch drain line" (об этом подробнее немного ниже).
 |
 |
Рис. 8. Схемы оптических сенсоров "высокого" (слева) и "низкого" (справа) уровней.
Помимо выходов с открытым коллектором, каждый датчик имеет силовой выход, подключаемый к управляющему электроду соответствующего тиристора, и вход стробирования. Сенсор ступени предварительного разгона (он же датчик наличия снаряда перед выстрелом) реализован по такой же HS схеме, но сама ступень устроена проще остальных - это одна катушка, коммутируемая тиристором по сигналу от сенсора.
Запираемый силовой ключ и генератор стробирующих импульсов будут расположены на одной плате, схема которой показана на рис. 9.
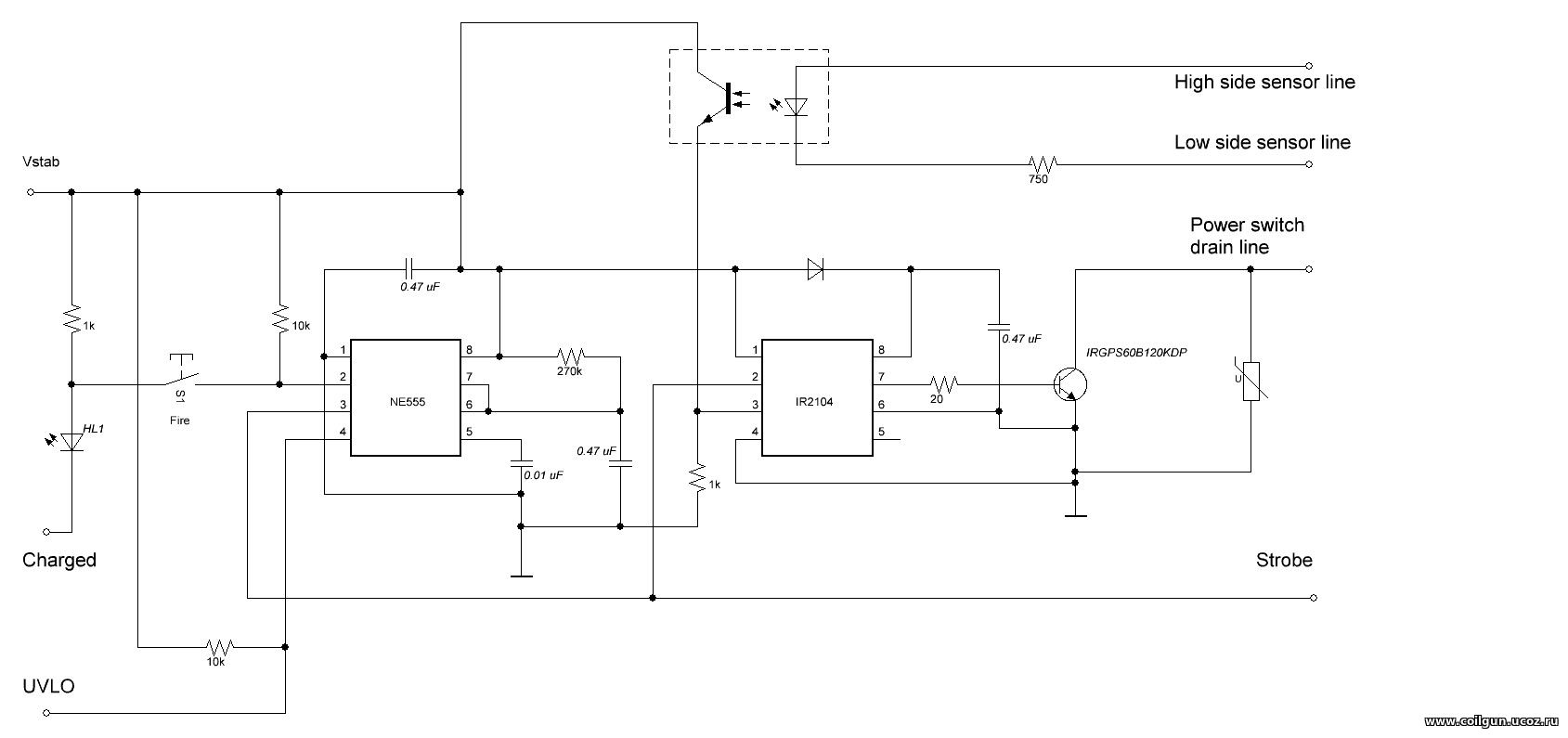
Рис. 9. Генератор управляющих импульсов.
Управляющий генератор построен на простом 555 таймере и запускается при наличии сигнала о зарядке конденсаторов ("Charged"), поступающего от зарядно - контрольного блока (см. раздел 2), и при отсутствии сигнала о разряде аккумуляторов (UVLO). С выхода таймера импульс попадает на драйвер, управляющий затвором мощного IGBT ключа, а также на стробирующие входы сенсоров и цепочку ИК-светодиодов ускоряющей части. Этот же сигнал останавливает работу высоковольтного преобразователя зарядно-контрольного блока по входу "Blank signal". На вход SD драйвера подается сигнал с оптопары, которая подключена к линиям сенсоров высокого и низкого уровня.
Таким образом, силовой ключ открывается, только если обе эти линии активны (т. е. сработало хотя бы по одному датчику из групп LS и HS).
Функционировать все это хозяйство должно следующим образом.
При нажатии кнопки "выстрел" ("Fire", S1 на рис. 9) генерируется стробирующий импульс, который открывает все ИК-светодиоды и активирует сенсоры. При наличии снаряда в магазине, датчик ступени предразгона открывает соответствующий тиристор (Tpre на рис. 7), и одновременно "притягивает" HS линию к напряжению питания. Силовой IGBT-транзистор при этом еще закрыт, т.к. вторая LS линия не активирована. Как только снаряд достигает датчика первой биступени, открывается тиристор T11 и линия LS "притягивается" к земле, открывая транзистор. Таким образом, запитывается первая катушка первой биступени. Она остается в активном состоянии до тех пор, пока, по мере своего движения, снаряд не покидает магазин и датчик предварительной ступени не засвечивается соответствующим ИК-диодом - с этого мгновения линия HS возвращается в высокоимпедансное состояние, и транзистор закрывается. Положения датчиков (а точнее, длина снаряда) подобраны таким образом, что этот момент соответствует нахождению острия снаряда у начала второй катушки. Теперь импульс самоиндукции открывает тиристор Т12, запитывающий эту вторую катушку, и начинается следующий такт работы биступени, сопровождающийся полным разрядом конденсатора С1. При этом IGBT остается закрытым, пока передний конец снаряда не достигнет сенсора следующей ступени - тогда запускается новый цикл работы схемы.
Таким образом, управление пятью ступенями осуществляется всего по двум сигнальным и одной силовой линиям. В принципе, подобный алгоритм можно использовать и для гауссовок с десятком и более ступеней - там он должен дать особенно ощутимый выигрыш по сравнению с традиционной схемой "один датчик - одна линия". Единственный сложный момент - точный подбор длины снаряда и расстояния между оптическими сенсорами - они должны соответствовать оптимальным условиям работы койлгана, рассчитанным в предыдущем разделе.
Описанный принцип действия гауссовки ЕМ-4 проиллюстрирован на анимации (рис. 10).
Рис. 10. Принцип действия биступенчатого койлгана ЕМ-4.
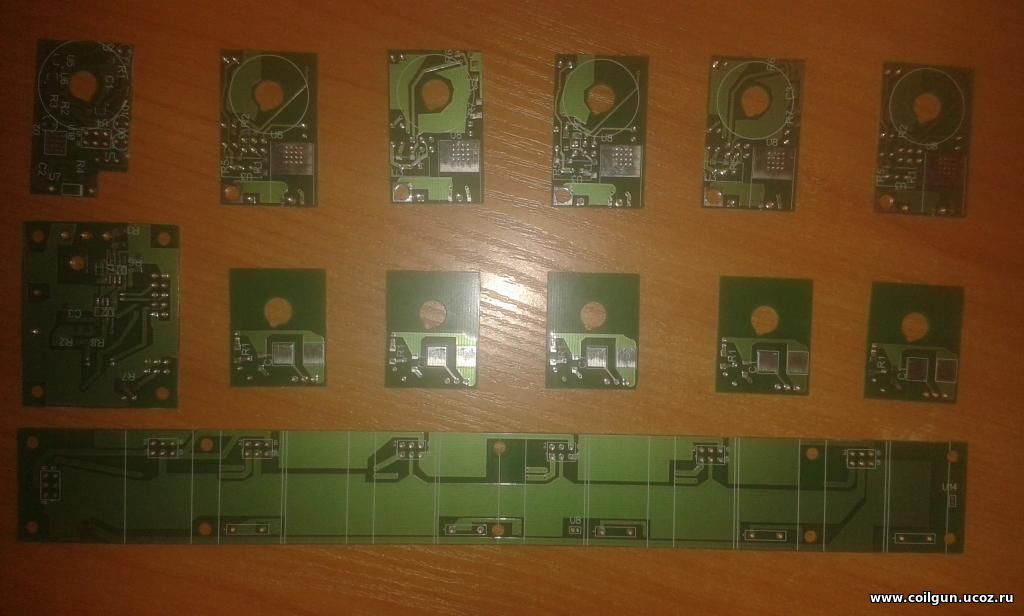
На рис. 11 показаны фото печатных плат ускорительной части гауссовки до и после распайки на них компонентов.
 |
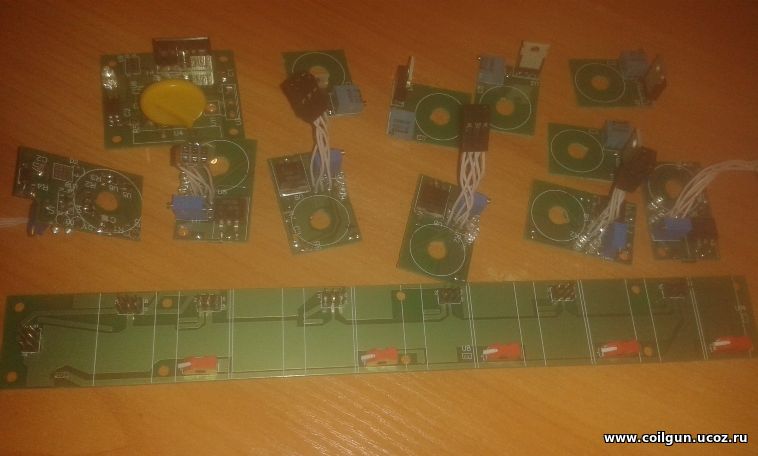 |
Рис. 11. Печатные платы для ускорительной части гауссовки ЕМ-4.
После монтажа плат сенсоров я решил их испытать, для чего собрал их в "пирамиду" друг за другом, используя латунные стойки для печатных плат. В качестве ствола была взята прозрачная виниловая трубка, через которую под действием вилы тяжести двигалась модель снаряда (маленький гвоздик), по очереди затеняя фотодатчики и вызывая срабатывания ступеней (эти моменты на видео ниже отмечаются вспышками зеленых светодиодов). В качестве нагрузки для тиристоров были использованы мощные резисторы номиналом 68 Ом, параллельно которым были подключены желтые светодиоды, размещенные на отдельной плате. Там же был помещен синий светодиод, подключенный между шинами LS и HS - его срабатывание отмечало момент, когда должен активироваться управляемый силовой ключ. Поскольку первая ступень (pre stage) в этом тесте все время находилась в "активном" состоянии, синяя вспышка имеет место при прохождении снарядом каждой нечетной ступени.
На видео ниже зафиксирован момент испытаний в замедленной съемке (400 кадров/сек). Видно, как тиристоры всех ступней (кроме неподключенной pre stage) по очереди активируются.
5. Снаряды и система подачи.
Для ЕМ-4 были изготовлены стреловидные снаряды с наконечниками из обработанных отрезков обычных гвоздей диаметром 6 мм и стабилизатором из пластиковой трубочки для коктейля (см. рис. 12). Для определения габаритов составных частей были использованы положения этой моей работы. Как видно, на задней части наконечника сформировано сужение, на которое нанесены кольцевые насечки глубиной около 0,5 мм - это сделано для лучшего сцепления со стабилизатором, для приклеивания которого к наконечнику использовался обычный термоклей. Масса наконечника составила 2,7 г, стабилизатора вместе с клеем - менее 0,3 г. Диаметр наконечника 5,5 мм, длина 16 мм, общая длина снарядика со стабилизатором - 57 мм. То есть удалось воспроизвести те значения массогабаритов, которые использовались при предварительном моделировании койлгана в FEMM (см. раздел 3). Поэтому можно ожидать, что результаты моделирования не будут сильно отличаться от реальности.
 |
 |
 |
Рис. 12. Изготовление стабилизированных снарядов для ЕМ-4. |
Завершая разговор с снаряде, хотелось еще заметить, что он получился намного компактнее, чем образец, выполненный для "электрического лука" ЕМ-3, а паразитная масса (стабилизатора) оказалась гораздо меньше, что должно, по идее, благотворно отразиться на КПД ускорения. Достигнуто это было за счет сокращения длины стабилизатора и снижения его прочности. Насколько такой подход окажется оправданным - покажет практика.
Система подачи снарядов изначально планировалась простейшая - гравитационная. То есть снарядики сами (под действием силы тяжести) должны скатываться в ствол. Тем не менее, даже с такой примитивной схемой пришлось повозиться. Кстати, в процессе отработки этого узла я перерыл немало материала по данной тематике и подготовил небольшую статью, из которой можно понять, почему именно такой тип подачи был выбран.
Первый вариант магазина представлял собой простую неразъемную фанерную коробочку, с прикрепленным фигурным элементом из оргстекла, в котором был предусмотрен вырез под острия снарядных наконечников. С боков оставлены отверстия под светодиод и фототранзистор стартовой ступени. Все детальки были вырезаны на лазерном гравере (см. рис. 13). Спереди в фанерке был также предусмотрен вырез под прямоугольный постоянный магнитик, который должен был удерживать нижний снаряд в необходимом положении.
 |
 |
 |
 |
Рис. 13. Первый вариант системы подачи. На последнем снимке виден удерживающий магнитик, "вмурованный" в вырез под каналом ствола.
Этот магнитик и стал причиной того, что первая версия подачи отправилась в утиль: дело в том, что, притягивая к себе наконечник снаряда, магнит перекашивал его - задняя часть (стабилизатор) задиралась вверх внутри зарядного канала, и выстрела произойти не могло. Кроме того, были и другие недостатки - например, в ходе экспериментов возникала необходимость остановить стрельбу и извлечь оставшиеся заряды (по причине того же заклинивания их внутри), а этот простой магазин такой опции не предусматривал.
Вторая версия магазина изображена на рис. 14.
 |
 |
 |
Рис. 14. Гравитационная подача для койлгана ЕМ-4. Фото с лучшим разрешением можно посмотреть в фотоальбоме, посвященном разработке этой гауссовки. |
Как видно, подача состоит из 2 деталей, изготовленных методом 3D - печати - корпуса и слайдера, в котором предусмотрены своего рода "посадочные места" под снаряды в виде простых цилиндрических держателей. Они входят в полости пластиковых стабилизаторов и предотвращают перекашивания и заклинивания снарядов при подаче. Нижняя внутренняя поверхность корпуса выполнена в форме полуцилиндра, повторяющего внешний контур ствольной трубки, в которой должен быть изготовлен вырез на необходимую длину - снаряд входит в этот вырез наконечником и фиксируется небольшим цилиндрическим магнитиком, под который предусмотрено специальное глухое отверстие в нижней грани корпуса (см. последнее фото на рис. 14). Рядом с этим отверстием видно другое - сквозное и меньшего диаметра. Оно служит для принудительного выталкивания слайдера из корпуса магазина вверх на случай, если что-то пошло не так. Силы притяжения магнита достаточно для того, что удерживать слайдер со всем снарядами в положении "вверх ногами", то есть, если перевернуть гауссовку, то самопроизвольного опорожнения магазина не произойдет (хотя подача, конечно, функционировать тоже не будет).
При каждом выстреле слайдер сдвигается на одну позицию вниз, предоставляя очередному снаряду занять место напротив разгонных катушек. При этом он затемняет собой фототранзистор стартовой ступени (pre stage) от ИК -светодиода (под них предусмотрены боковые отверстия в корпусе магазина), и если снарядов уже нет, то очередного выстрела не происходит.
Система подачи была испытана на простом стенде, собранном из двух уголков и подходящей дощечки (рис. 15). В качестве ствола использована латунная трубочка диаметром 7 мм, закрепленная на стенде при помощи термоклея. Для имитации подачи снарядов в ствол койлгана была намотана специальная плоская катушка большого наружного диаметра, которая в состоянии "зацепить" своим полем снаряд, находящийся в магазине на некотором изначальном удалении от нее. Ее параметры - наружный диаметр 23,5 мм, длина - 6 мм, намотано 570 витков провода диаметром 0,22 мм по меди в соответствии с технологией, описанной мной здесь (остальные катушки койлгана будут наматываться таким же образом). Для питания системы подачи использовался один конденсатор 400 В х 150 мкФ.
 |
 |
 |
 |
Рис. 15. Собираем стенд для тестирования магазина.
Внизу приведена съемка испытаний - как видно, магазин на 6 зарядов опорожняется без осечек.